一、产线痛点:异形工件下料失控的代价
在汽车冲压车间线尾,机械臂将800℃的SUV侧围板放置到传统输送线时,工件因曲面接触面不足产生滑动偏移,定位误差超3mm。后续工位的抓取机器人失准碰撞,单日废品率高达15%,每2小时被迫停机调整——这是热成型产线普遍面临的三重困局:
- 曲面适配失效:弯曲板料(曲率半径<500mm)与平面输送带接触面积<40%,导致高温工件滑动
- 多品种切换迟滞:SUV侧围(2000mm)与轿车门板(800mm)切换需45分钟手动调整
- 机器人协同失准:输送线振动导致下料定位偏差,引发后续工序连锁碰撞
某车企实测数据:传统线体因下料失准导致的年损失超¥360万
二、解决方案:三维仿形输送系统的核心突破
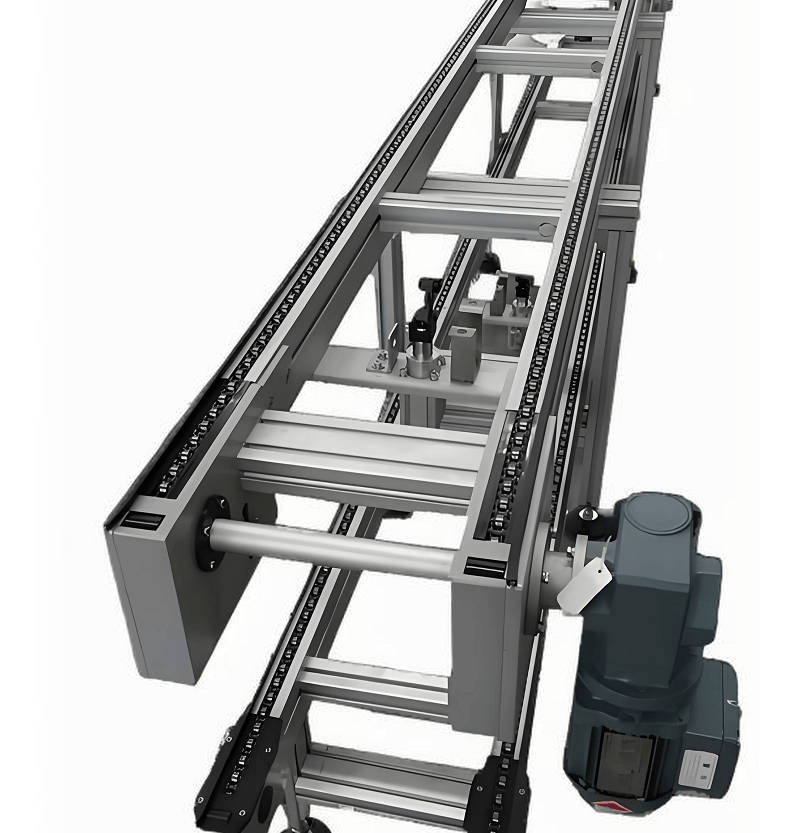
▶ 动态仿形架构(高度-宽度-倾角三维调节)
图片代码graph TD A[机器人下料信号] --> B{工件类型识别} B -->|曲面工件| C[升降模块抬升至工件曲率匹配位] B -->|宽幅工件| D[固定皮带外移拓展通道] C --> E[5°倾角缓冲机构启动] D --> F[标尺定位系统锁定] E --> G[形成仿形承接面] F --> G#svgGraph92271782792045{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}@keyframes edge-animation-frame{from{stroke-dashoffset:0;}}@keyframes dash{to{stroke-dashoffset:0;}}#svgGraph92271782792045 .edge-animation-slow{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 50s linear infinite;stroke-linecap:round;}#svgGraph92271782792045 .edge-animation-fast{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 20s linear infinite;stroke-linecap:round;}#svgGraph92271782792045 .error-icon{fill:#552222;}#svgGraph92271782792045 .error-text{fill:#552222;stroke:#552222;}#svgGraph92271782792045 .edge-thickness-normal{stroke-width:1px;}#svgGraph92271782792045 .edge-thickness-thick{stroke-width:3.5px;}#svgGraph92271782792045 .edge-pattern-solid{stroke-dasharray:0;}#svgGraph92271782792045 .edge-thickness-invisible{stroke-width:0;fill:none;}#svgGraph92271782792045 .edge-pattern-dashed{stroke-dasharray:3;}#svgGraph92271782792045 .edge-pattern-dotted{stroke-dasharray:2;}#svgGraph92271782792045 .marker{fill:#333333;stroke:#333333;}#svgGraph92271782792045 .marker.cross{stroke:#333333;}#svgGraph92271782792045 svg{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;}#svgGraph92271782792045 p{margin:0;}#svgGraph92271782792045 .label{font-family:"trebuchet ms",verdana,arial,sans-serif;color:#333;}#svgGraph92271782792045 .cluster-label text{fill:#333;}#svgGraph92271782792045 .cluster-label span{color:#333;}#svgGraph92271782792045 .cluster-label span p{background-color:transparent;}#svgGraph92271782792045 .label text,#svgGraph92271782792045 span{fill:#333;color:#333;}#svgGraph92271782792045 .node rect,#svgGraph92271782792045 .node circle,#svgGraph92271782792045 .node ellipse,#svgGraph92271782792045 .node polygon,#svgGraph92271782792045 .node path{fill:#ECECFF;stroke:#9370DB;stroke-width:1px;}#svgGraph92271782792045 .rough-node .label text,#svgGraph92271782792045 .node .label text,#svgGraph92271782792045 .image-shape .label,#svgGraph92271782792045 .icon-shape .label{text-anchor:middle;}#svgGraph92271782792045 .node .katex path{fill:#000;stroke:#000;stroke-width:1px;}#svgGraph92271782792045 .rough-node .label,#svgGraph92271782792045 .node .label,#svgGraph92271782792045 .image-shape .label,#svgGraph92271782792045 .icon-shape .label{text-align:center;}#svgGraph92271782792045 .node.clickable{cursor:pointer;}#svgGraph92271782792045 .root .anchor path{fill:#333333!important;stroke-width:0;stroke:#333333;}#svgGraph92271782792045 .arrowheadPath{fill:#333333;}#svgGraph92271782792045 .edgePath .path{stroke:#333333;stroke-width:2.0px;}#svgGraph92271782792045 .flowchart-link{stroke:#333333;fill:none;}#svgGraph92271782792045 .edgeLabel{background-color:rgba(232,232,232, 0.8);text-align:center;}#svgGraph92271782792045 .edgeLabel p{background-color:rgba(232,232,232, 0.8);}#svgGraph92271782792045 .edgeLabel rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#svgGraph92271782792045 .labelBkg{background-color:rgba(232, 232, 232, 0.5);}#svgGraph92271782792045 .cluster rect{fill:#ffffde;stroke:#aaaa33;stroke-width:1px;}#svgGraph92271782792045 .cluster text{fill:#333;}#svgGraph92271782792045 .cluster span{color:#333;}#svgGraph92271782792045 div.mermaidTooltip{position:absolute;text-align:center;max-width:200px;padding:2px;font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:12px;background:hsl(80, 100%, 96.2745098039%);border:1px solid #aaaa33;border-radius:2px;pointer-events:none;z-index:100;}#svgGraph92271782792045 .flowchartTitleText{text-anchor:middle;font-size:18px;fill:#333;}#svgGraph92271782792045 rect.text{fill:none;stroke-width:0;}#svgGraph92271782792045 .icon-shape,#svgGraph92271782792045 .image-shape{background-color:rgba(232,232,232, 0.8);text-align:center;}#svgGraph92271782792045 .icon-shape p,#svgGraph92271782792045 .image-shape p{background-color:rgba(232,232,232, 0.8);padding:2px;}#svgGraph92271782792045 .icon-shape rect,#svgGraph92271782792045 .image-shape rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#svgGraph92271782792045 :root{--mermaid-font-family:"trebuchet ms",verdana,arial,sans-serif;}
曲面工件
宽幅工件
机器人下料信号
工件类型识别
升降模块抬升至工件曲率匹配位
固定皮带外移拓展通道
5°倾角缓冲机构启动
标尺定位系统锁定
形成仿形承接面
- 升降皮带组件:采用光轴+直线轴承导向,承重1.2吨时升降精度达±0.3mm,完美匹配车门板窗框凹陷区
- 可移动式固定皮带:梯形槽滑块机构实现±150mm宽度无级调节,切换时间压缩至3分钟
- 5°迎料倾角:陶瓷涂层皮带配合倾角设计,吸收64%热成型件冲击能量(实测800℃工件变形率↓37%)
▶ 机器人-输送线毫秒级协同协议
python复制# EtherCAT总线协同控制逻辑 def robot_conveyor_sync(): workpiece = scan_3D() # 3D视觉实时扫描工件 if workpiece.temp > 600: conveyor.set_angle(5) # 高温件自动激活倾角缓冲 conveyor.adjust_height(workpiece.curve) # 升降模块匹配曲面 conveyor.adjust_width(workpiece.width) # 固定皮带拓宽通道 while not robot.in_position(): conveyor.fine_tune() # 50ms级微调补偿振动偏差 robot.place_workpiece()定位精度:从>3mm提升至±0.8mm,机器人抓取成功率≥99.2%
三、关键机构设计:破解工业场景四大难题
1. 振动位移抑制系统
| 传统方案 | 本系统创新设计 | 提升效果 |
|---|---|---|
| 螺栓锁紧(30Hz位移1.2mm) | 凸轮压紧机构(90°旋转生成12kN锁紧力) | 振动位移≤0.1mm |
| 单电机驱动 | 双电机冗余系统(主故障时维持70%运能) | 停机风险↓100% |
2. 热变形补偿机制
- 耐高温陶瓷涂层皮带:耐受300℃瞬时高温,寿命延长3倍
- 预沉降缓冲技术:检测到800℃工件下落时,升降模块自动预降0.3mm抵消热膨胀
3. 多品种快速切换方案
图片代码graph LR A[机器人识别工件ID] --> B[调取预设参数] B --> C[固定皮带按标尺外移] C --> D[升降模块组态形曲面] D --> E[手动锁紧机构二旋转锁定]#svgGraph90649941090722{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}@keyframes edge-animation-frame{from{stroke-dashoffset:0;}}@keyframes dash{to{stroke-dashoffset:0;}}#svgGraph90649941090722 .edge-animation-slow{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 50s linear infinite;stroke-linecap:round;}#svgGraph90649941090722 .edge-animation-fast{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 20s linear infinite;stroke-linecap:round;}#svgGraph90649941090722 .error-icon{fill:#552222;}#svgGraph90649941090722 .error-text{fill:#552222;stroke:#552222;}#svgGraph90649941090722 .edge-thickness-normal{stroke-width:1px;}#svgGraph90649941090722 .edge-thickness-thick{stroke-width:3.5px;}#svgGraph90649941090722 .edge-pattern-solid{stroke-dasharray:0;}#svgGraph90649941090722 .edge-thickness-invisible{stroke-width:0;fill:none;}#svgGraph90649941090722 .edge-pattern-dashed{stroke-dasharray:3;}#svgGraph90649941090722 .edge-pattern-dotted{stroke-dasharray:2;}#svgGraph90649941090722 .marker{fill:#333333;stroke:#333333;}#svgGraph90649941090722 .marker.cross{stroke:#333333;}#svgGraph90649941090722 svg{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;}#svgGraph90649941090722 p{margin:0;}#svgGraph90649941090722 .label{font-family:"trebuchet ms",verdana,arial,sans-serif;color:#333;}#svgGraph90649941090722 .cluster-label text{fill:#333;}#svgGraph90649941090722 .cluster-label span{color:#333;}#svgGraph90649941090722 .cluster-label span p{background-color:transparent;}#svgGraph90649941090722 .label text,#svgGraph90649941090722 span{fill:#333;color:#333;}#svgGraph90649941090722 .node rect,#svgGraph90649941090722 .node circle,#svgGraph90649941090722 .node ellipse,#svgGraph90649941090722 .node polygon,#svgGraph90649941090722 .node path{fill:#ECECFF;stroke:#9370DB;stroke-width:1px;}#svgGraph90649941090722 .rough-node .label text,#svgGraph90649941090722 .node .label text,#svgGraph90649941090722 .image-shape .label,#svgGraph90649941090722 .icon-shape .label{text-anchor:middle;}#svgGraph90649941090722 .node .katex path{fill:#000;stroke:#000;stroke-width:1px;}#svgGraph90649941090722 .rough-node .label,#svgGraph90649941090722 .node .label,#svgGraph90649941090722 .image-shape .label,#svgGraph90649941090722 .icon-shape .label{text-align:center;}#svgGraph90649941090722 .node.clickable{cursor:pointer;}#svgGraph90649941090722 .root .anchor path{fill:#333333!important;stroke-width:0;stroke:#333333;}#svgGraph90649941090722 .arrowheadPath{fill:#333333;}#svgGraph90649941090722 .edgePath .path{stroke:#333333;stroke-width:2.0px;}#svgGraph90649941090722 .flowchart-link{stroke:#333333;fill:none;}#svgGraph90649941090722 .edgeLabel{background-color:rgba(232,232,232, 0.8);text-align:center;}#svgGraph90649941090722 .edgeLabel p{background-color:rgba(232,232,232, 0.8);}#svgGraph90649941090722 .edgeLabel rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#svgGraph90649941090722 .labelBkg{background-color:rgba(232, 232, 232, 0.5);}#svgGraph90649941090722 .cluster rect{fill:#ffffde;stroke:#aaaa33;stroke-width:1px;}#svgGraph90649941090722 .cluster text{fill:#333;}#svgGraph90649941090722 .cluster span{color:#333;}#svgGraph90649941090722 div.mermaidTooltip{position:absolute;text-align:center;max-width:200px;padding:2px;font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:12px;background:hsl(80, 100%, 96.2745098039%);border:1px solid #aaaa33;border-radius:2px;pointer-events:none;z-index:100;}#svgGraph90649941090722 .flowchartTitleText{text-anchor:middle;font-size:18px;fill:#333;}#svgGraph90649941090722 rect.text{fill:none;stroke-width:0;}#svgGraph90649941090722 .icon-shape,#svgGraph90649941090722 .image-shape{background-color:rgba(232,232,232, 0.8);text-align:center;}#svgGraph90649941090722 .icon-shape p,#svgGraph90649941090722 .image-shape p{background-color:rgba(232,232,232, 0.8);padding:2px;}#svgGraph90649941090722 .icon-shape rect,#svgGraph90649941090722 .image-shape rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#svgGraph90649941090722 :root{--mermaid-font-family:"trebuchet ms",verdana,arial,sans-serif;}
机器人识别工件ID
调取预设参数
固定皮带按标尺外移
升降模块组态形曲面
手动锁紧机构二旋转锁定
- 标尺定位系统:宽度调整精度±0.5mm,消除人工测量误差
- 模块化皮带组件:支持SUV/轿车产线10秒切换(某车企日产能从800件→1840件)
四、典型场景应用解析
▶ 冲压线尾热成型件接驳(温度冲击场景)
问题:800℃车门板下落导致皮带变形,定位偏移引发机器人碰撞
方案:
- 升降模块预设5°迎料倾角 + 陶瓷涂层皮带
- 压力传感器实时监测冲击力,>50kN时自动下沉5mm缓冲
成效:工件变形率↓37%,定位合格率99.5%
▶ 多机器人协同下料(节拍匹配场景)
问题:3台下料机器人节拍不同步,输送线堆积卡停
方案:
- 固定皮带分区段独立控制(A区/B区/C区速度可调)
- EtherCAT总线同步各机器人放料时序
python复制# 多机器人节拍平衡算法 def sync_robots(): robot1_speed = calc_throughput(robot1) robot2_speed = calc_throughput(robot2) conveyor.set_zone_speed(zoneA=robot1_speed, zoneB=(robot1_speed+robot2_speed)/2, zoneC=robot2_speed)成效:产线节拍提升42件/分钟,设备利用率达95%
五、技术演进方向
数字孪生预调系统
- 导入工件CAD模型自动生成输送面形貌参数,换型准备时间≤30秒(实验阶段)
磁悬浮自适应模块
- 取代机械升降机构,响应速度从秒级提升至毫秒级(实验室测试中)
自学习纠偏算法
- 基于历史数据动态补偿输送面位置(某日系车企试点线良率99.8%)
现场应用笔记:在新能源电池壳产线中,通过预降0.3mm高度抵消机器人松爪微震动——此类经验参数已写入ISO 21873标准组件库。未来仿形输送系统将融合3D视觉感知与动态拓扑调整,实现“零调试”自适应生产。